|
|
|
|
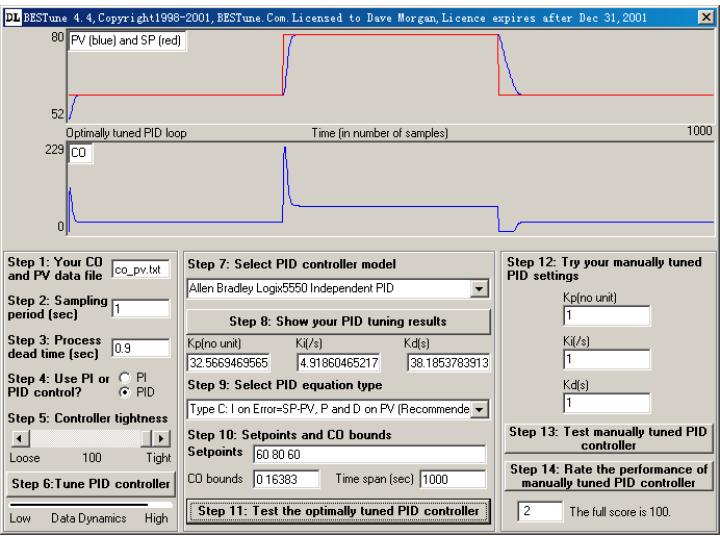
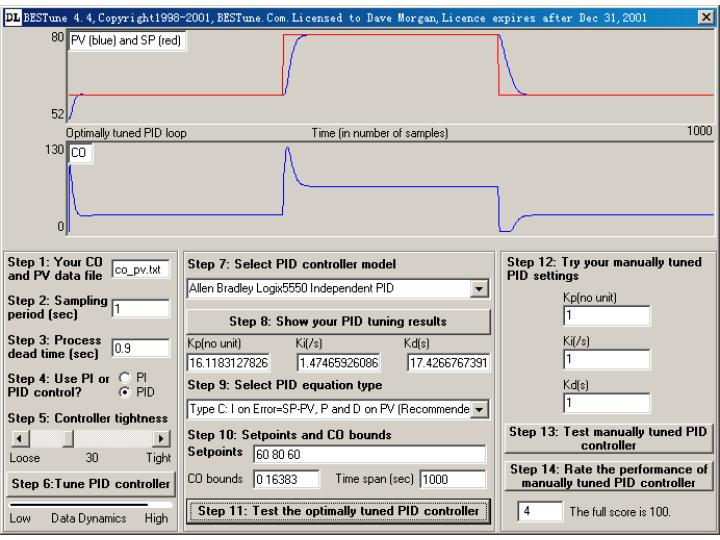
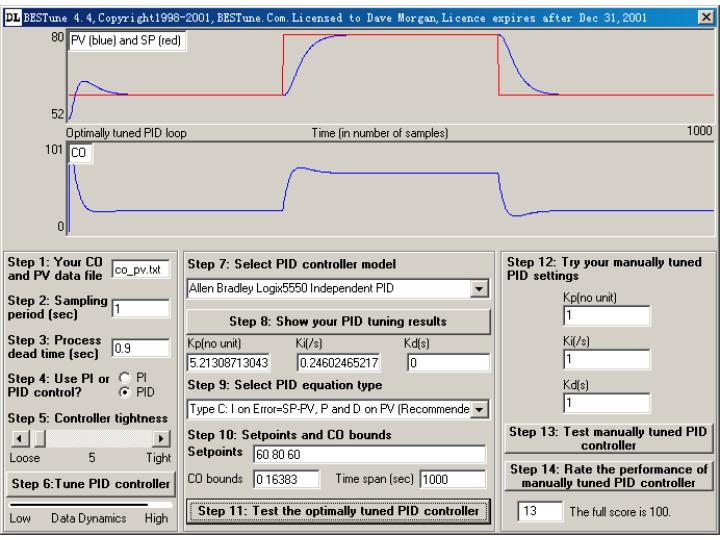
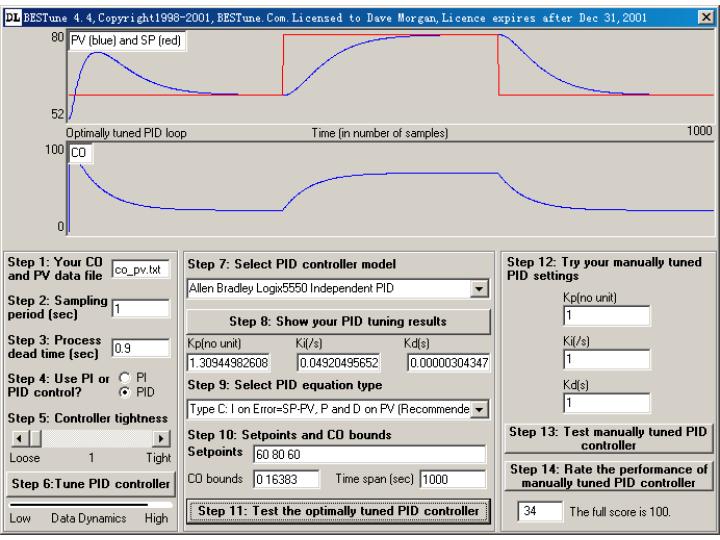
PID Controller with Different Tightness |
| BESTune allows users to specify different tightness when tuning their PID controllers. Here is an example. Using the CO and PV measurements that come with the BESTune package, we can get different PID controllers with different tightness, see below. |